

一、能实现什么效果
机器人 + 变位机 真正协调联动(6+1 或 6+2 轴)
焊接时工件跟着转,焊缝始终保持平焊位置
急停、安全、使能完全互锁
支持:焊接、搬运、翻转、回转变位机
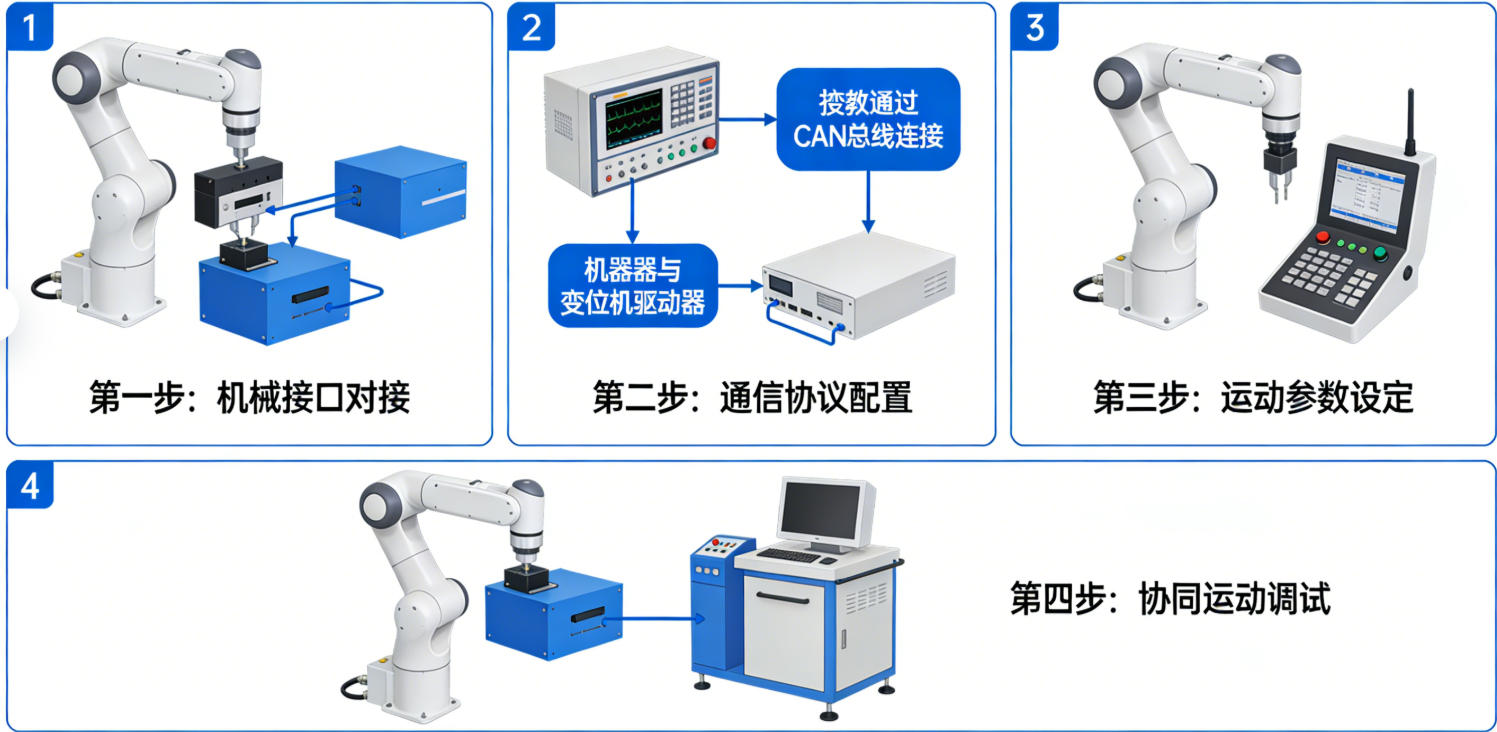
二、硬件怎么连接(最关键)
1. 控制连接(两种主流方式)
① 机器人直接带外部轴(推荐)
OTC 控制器:E200 / E300 / FD / BD 都支持
变位机伺服驱动器 → 直接接机器人控制器
通讯:
EtherCAT(最稳、最快)
或 OTC 专用轴控总线
优点:真正协调、精度高、接线简单
② 外部 PLC 控制(不推荐协调,只做同步)
PLC → 机器人:启动、停止、复位、就绪
PLC → 变位机:启动、角度、速度
只能顺序动作,不能轨迹联动
2. 安全互锁(必须接)
OTC 安全逻辑非常严格,不接不能运行:
急停回路串联
机器人急停 + 变位机急停 + 围栏急停
伺服使能互锁
变位机未就绪 → 机器人不能使能
限位信号
变位机正负限位 → 机器人立即停止
安全门 / 光栅
门开 → 双方同时安全停止
三、控制器设置(E200/E300 通用步骤)
进入 参数 → 外部轴配置
设定轴类型:
回转轴 / 翻转轴
输入:
减速比
编码器分辨率
限位角度
开启 协调模式(Coordinated Control)
做 坐标校准(3 点标定)
建立机器人与变位机的坐标关系
这是联动准不准的关键
四、配合动作怎么实现
1. 两种工作模式
① 协调模式(焊接用)
机器人走焊缝
变位机跟着同步转
焊缝始终保持最佳焊接姿态
② 独立模式(上下料用)
机器人动、变位机不动
或变位机转、机器人等待
2. 典型程序结构
plaintext
REM 外部轴协调启动 EXT_AXIS_ON COORD_ON REM 变位机转到角度 ROT_ANGLE A=90 B=0 REM 焊接+变位机联动 ARCON MOV W1 ARCWELD W2 ARCOFF REM 关闭协调 COORD_OFF EXT_AXIS_OFF
五、最容易踩的坑(避坑指南)
不做坐标标定 → 轨迹飘、焊偏
安全回路没接好 → 一开机就报警
减速比填错 → 角度完全不对
限位没设 → 容易撞机
不同品牌驱动器乱接 → 无法协调
