

OTC 机器人(以 FD 系列为例)常用坐标系共 5 种:关节、绝对(世界)、基座、工具、工件;其中焊接场景最常用工具 + 工件,手动调位常用关节 + 绝对。
一、关节坐标系(Joint)
特点:控制 1~6 轴独立转动,无 XYZ 联动;原点为各轴机械零点;方向固定(A1 底座转、A2 大臂、A3 小臂、A4~A6 腕部)。
应用场景:
回零 / 原点校准、单轴微调、极限位置调整
解除奇异点、碰撞后姿态复位
变位机 / 滑台等外部轴手动(仅关节模式)
操作:示教器按【轴】→选 A1~A6→+/- 移动。
二、绝对坐标系(Absolute / 世界)
特点:固定于地面 / 地基,全局唯一基准;原点在机器人底座中心,XYZ 方向固定;与机器人姿态无关。
应用场景:
大范围快速定位、避障移动
多机协同 / 与视觉 / 传送带联动(统一基准)
工件位置固定时的粗略示教
操作:按【直角】→选【绝对】→XYZ 平移 / ABC 旋转。

三、基座坐标系(base)
特点:固定于机器人底座,随底座移动;原点底座中心,XYZ 与绝对坐标系平行;是工具 / 工件的计算基准。
应用场景:
机器人本体相关的点位示教(如固定工装)
工具 / 工件坐标系标定的参考
无工件基准时的通用编程
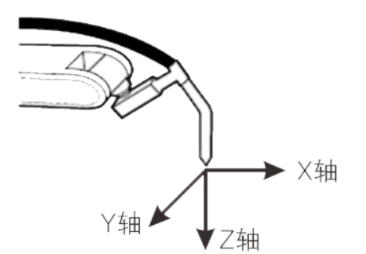
四、工具坐标系(Tool/TCP)
特点:原点在工具中心点(TCP,如焊枪尖端);Z 轴沿工具工作方向;随末端实时运动;支持多工具切换(0~15 号)。
应用场景:
焊接 / 喷涂 / 打磨:TCP 精准对准焊缝 / 工作面
姿态控制:绕 TCP 旋转(如焊枪角度微调)
工具更换:只需切换工具号,无需重编程序
标定:4 点法(尖端对同一点 4 姿态)+ABC 方向。
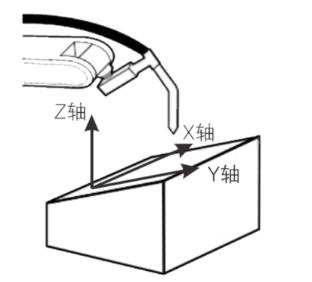
五、工件坐标系(Workpiece)
特点:原点 / 轴固定在工件上;随工件变位 / 移动;支持多工件(0~15 号);贴合工件轮廓,编程直观。
应用场景:
焊接 / 切割:工件焊缝为基准,轨迹贴合工件
多工件工位:同程序换工件只需切换工件号
工件变位:变位机转动时,轨迹自动适配
标定:3 点法(原点、X 向、XY 平面点)。
坐标系对比速查表
表格
| 坐标系 | 核心特点 | 固定 / 随动 | 最常用场景 |
|---|---|---|---|
| 关节 | 单轴独立,无联动 | 机械零点 | 回零、微调、解奇异点 |
| 绝对 | 全局固定,地面基准 | 固定 | 大范围移动、多机协同 |
| 基座 | 底座基准,本体相关 | 随底座 | 工装定位、标定参考 |
| 工具 | TCP 为原点,随末端动 | 随工具 | 焊接 / 喷涂、姿态控制 |
| 工件 | 工件为基准,贴合轮廓 | 随工件 | 焊接轨迹、多工件工位 |
典型组合用法(焊接场景)
手动调位:关节(解姿态)→绝对(快速定位)
精准示教:工具(TCP 对准)+ 工件(贴合焊缝)
程序切换:多工具 / 多工件时,直接切换坐标系号。
